SSSRCニュース
category
小型宇宙機システム研究センター(SSSRC)がCANSAT 気球試験を行いました
2020年12月19日(日)、小型宇宙機システム研究センター(SSSRC)学生が、CanSat放出実験を行いました。

SSSRCに所属する工学域機械系学類航空宇宙工学課程2年の西尾圭太さんに当日レポートを書いていただきました。
************************************************
こんにちは、SSSRCに所属する2年生の西尾圭太です。2020年12月20日(日)に、大阪府立茨木工科高校と小型宇宙機システム研究センター(SSSRC)で、Cansat気球試験を行いました。

<気球の準備の様子>
SSSRCでは、新入生教育の一環でCansat実習を行っています。Cansat実習では、Cansatの製作を通して、目的を達成するために必要なシステムを構成する能力、プログラミング・電子工作など考えたものを実現する能力、問題解決能力、開発の足跡を残すための文書作成能力、プロジェクトマネジメント能力など、人工衛星・ロケット開発のために必要な能力を身に着けます。
今回の気球試験では、気球で作成したCansatを地上40mから落下させ、パラシュートで降下し着地後、自分たちで設定したミッションの遂行を実験します。今年度は、SSSRC1年生A ,B,C,D班の4機と大阪府立茨木工科高校の2機の計6機のCansatが気球試験を行いました。
今年度は新型コロナウイルスによる感染症の影響によって、例年とは違って、新入生教育、そしてCansat実習もオンライン中心で行うことになりましたが、無事気球試験を行うことができ、良かったです。
1年生には、新入生教育で行った講習やCansat実習を通して身につけた能力や方法などを、これからメンバーの一員に加わってもらうOPUSAT-Ⅲプロジェクトの人工衛星開発や、ハイブリッドロケットプロジェクトのロケット開発に発揮してもらえたら嬉しいです。
************************************************
また以下では、各班が作成したCanSatのミッション内容と仕様を各班代表の学生が報告してくれました。
A班
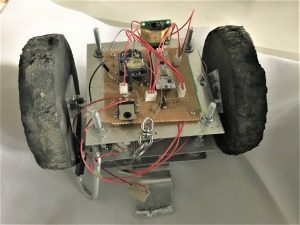
<機体外観>
A班は安全に落下させることを目的とするCanSatを作成しました。ミッション内容は、横転や破損することなく着地させることと、着地後パラシュートを分離し直進することです。工夫した点は電池を最下段において重心を下げた点とスタビライザーで横転しにくくした点です。
機体仕様
| マイコン | Nucleo-F303K8×1 |
| 電源 | アルカリ単3電池×3, 9V角型アルカリ電池 |
| 通信 | Xbee PRO Series1×1 |
| センサ類 | 気圧センサ BMP180
GPSモジュール GYSFDMAXB |
(工学域機械系学類1年 杉原想一郎)
B班

<機体外観>
B班は水の存在する惑星などに着水して、水を回収、分析することで生物が存在する可能性を調査するCansat「W-collector」を作成しました。 水を回収するために水中でも動作できるように機体を防水加工し、水を回収するポンプを搭載しています。水上での動力は簡易的なウォータージェット推進としました。また水に浮くために機体を軽量化しました。
機体仕様
| マイコン | Nucleo-F303K8×1 |
| 電源 | 9V電池×2(マイコン用),(水上走行用)
1.5V電池×4(陸上走行、水の回収) |
| モータードライバー | drv8833(水の回収用)
tb6612fng(陸上の走行用) |
| シリアル通信 | Xbee |
| 水の回収 | 水中ポンプEF11098 |
(工学域機械系学類1年 今吉龍一)
C班
<機体外観>
C班は、コロナ禍の社会において外出自粛が叫ばれていることを背景とし、人間の代わりにCanSatに買い物に行かせることで人々の外出自粛を支援し、感染リスクを下げるとともに不安を解消することをミッションとしました。Cansatは、障害物を避けながら目的地である店に移動し、目的地に着いたら店員に音で知らせます。その後、商品置きスペースが展開し、画面に表示することで買いたい商品を伝え、電子マネー払い(のデモ)を行います。
機体仕様
| マイコン | STM32F303K8
Arduino nano |
| 電源 | EBL9V充電池
eneloop pro 単3✕4 |
| GPSモジュール | GYSFDMAXB |
| モータードライバー | TB6612FNG |
| 超音波センサー | US-015 |
| 3軸ジャイロスコープ・3軸加速度センサーモジュール | MPU-6050 |
| 液晶ディスプレイモジュール | ST7789 |
(工学域電気電子系学類1年 山口敦史)
D班
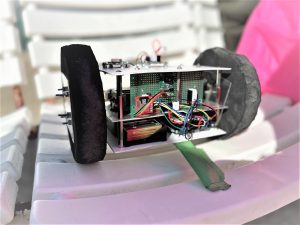
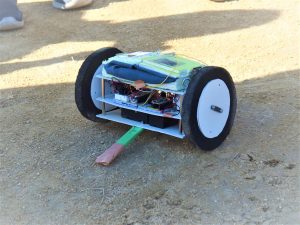
<機体外観>
D班は、近年高まる宇宙旅行への関心から、疑似月面探索を楽しむためのCansat“俺たちのジョバンニ99(ダブルナイン)”を作成しました。落下地点の位置情報から予め定義した2つのフォトスポットと観光地点(ゴール)への最短距離を計測、映像を撮影・保存しながらルートに従って走行し、ゴールへ向かいます。
試験本番、落下を3回を行いました。1回目は落下時点で9V電池が切れていました。2回目はパラシュートの切り離しと短距離走行のみ成功しました。3回目は2回目よりも長距離走行しました。しかし、直進できず、自力でフォトスポットとゴールにたどり着くことはできませんでした。機体を付近まで持って行くと到達したこと自体は判定できました。画像については全ての試験ではじめに撮れた1枚しか保存されていませんでした。
機体仕様
| 搭載機器 | |
| GPSモジュール | GYSFDMAXB |
| モータードライバー | DRV8833 |
| モーター | RA250060-58Y91 |
| マイコン | メイン Nucleo F303K8
サブ mbed LPC1768 |
| 電池 | モーター・ニクロム線用電池ENELOOP×4
マイコン用電池 9V角電池 |
| カメラモジュール | 小型TTLシリアルJPEGカメラ |
| SDカードスロット | SparkFun |
| 加速度・ジャイロセンサ | MPU6050 |
| 素材 | |
| 機体 | 上段・下段 低発泡塩ビ板
中断 アルミ板 |
| Cansatカバー | ポリセーム |
| タイヤ | NPスポンジ |

<Cansatカバー使用時>

<Cansatカバー展開時>
(工学域 機械系学類1年 長尾祐希)